
|
My first bot was based on the one described in the LEGO Mindstorms Scout manual (without the wings and bug-eyes). I had to start somewhere :-) The major modification was the introduction of 'railings' along the side of the processor unit to keep the motor and sensor cables clear of the tractor wheels or other external objects. The "dot" in front of the rover is a 25 cent coin (approx. 1 inch in diameter) to give some idea of scale. |
Not exactly a robot, but it proved to be an interesting mechanical challenge using
the available LEGO components.
Prototyped with LEGO
Mindstorms Scout®
Improved with LEGO
Mindstorms RCX®
Three sybsystems provide the 3-degrees of rotational freedom:
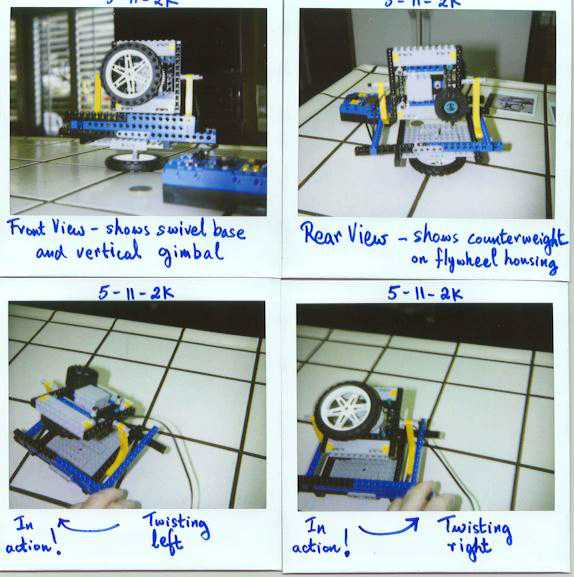
Allows you to feel the forces!
Twist base to the left or right
Uses sensor to automatically swivel the base
I had no idea, so did an experiment to determine it. I used a Lego motor direct-driven
Tractor wheel (like that shown in the photos above) and a 26 inch bicycle wheel.
With the electric motor on and the tractor wheel rotating, I applied its rubber surface
to the rubber of the bike wheel. When the bike wheel got up to constant speed under
friction, I used the audible beeping of the Scout brick to count the number of beeps
it took for the bike wheel to do one rotation. A single rotation was defined by noting
the (arbitrary) position of the air-valve on the bike wheel, and counting beeps until
the valve returned to that same position.
Here are the results: